Examples
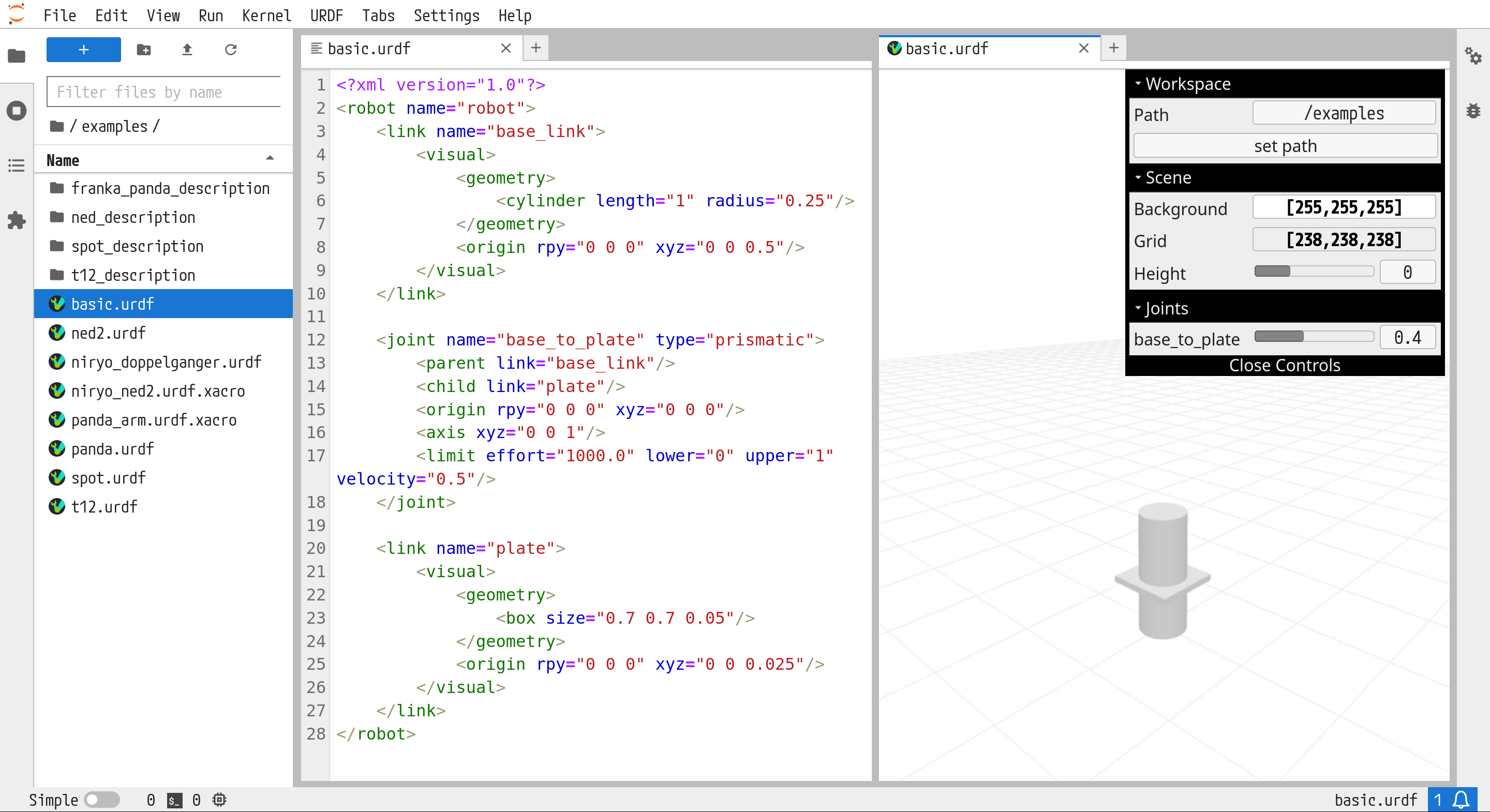
Basic Robot
This robot is simply two geometric components with a single prismatic joint.
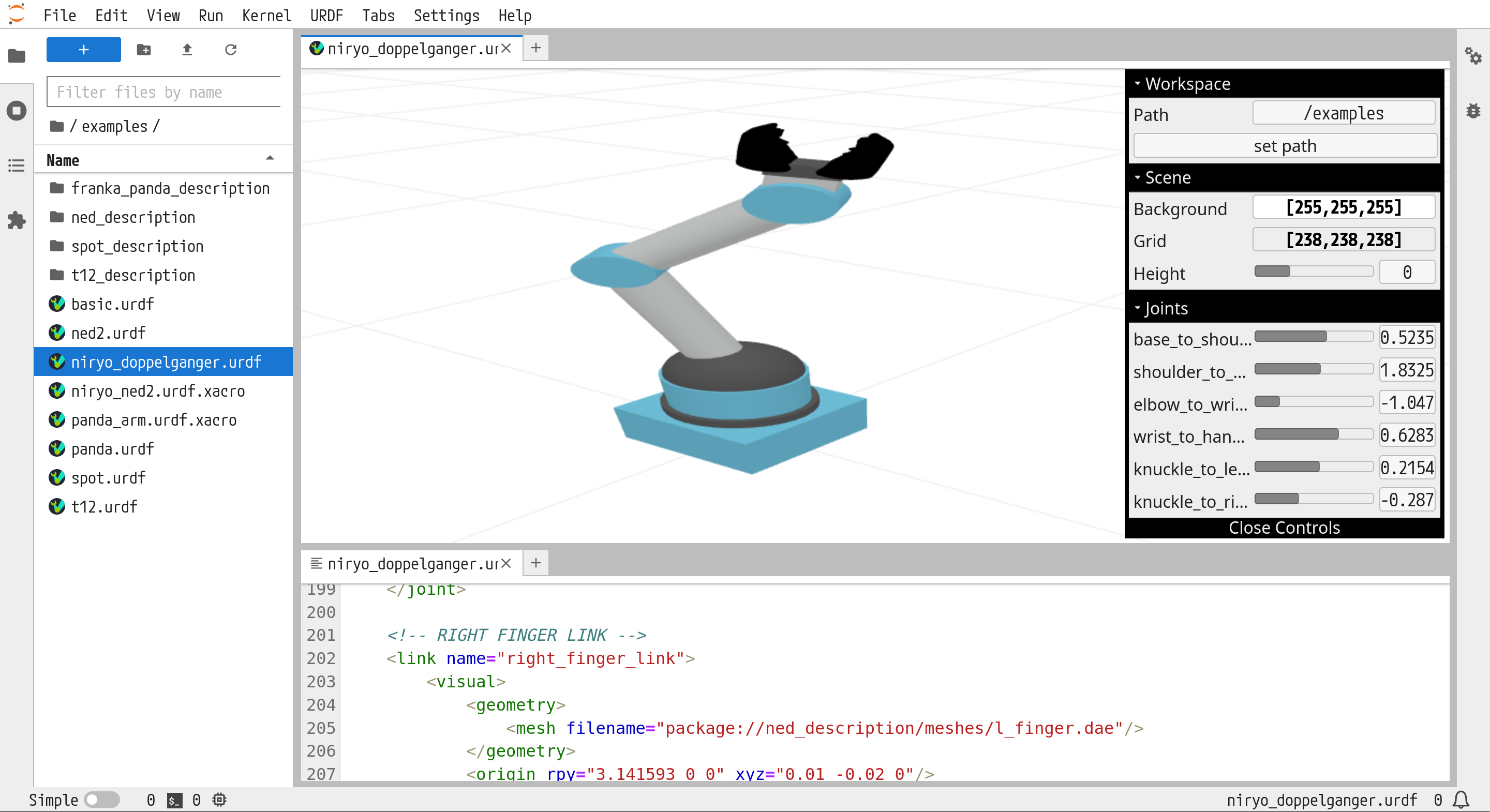
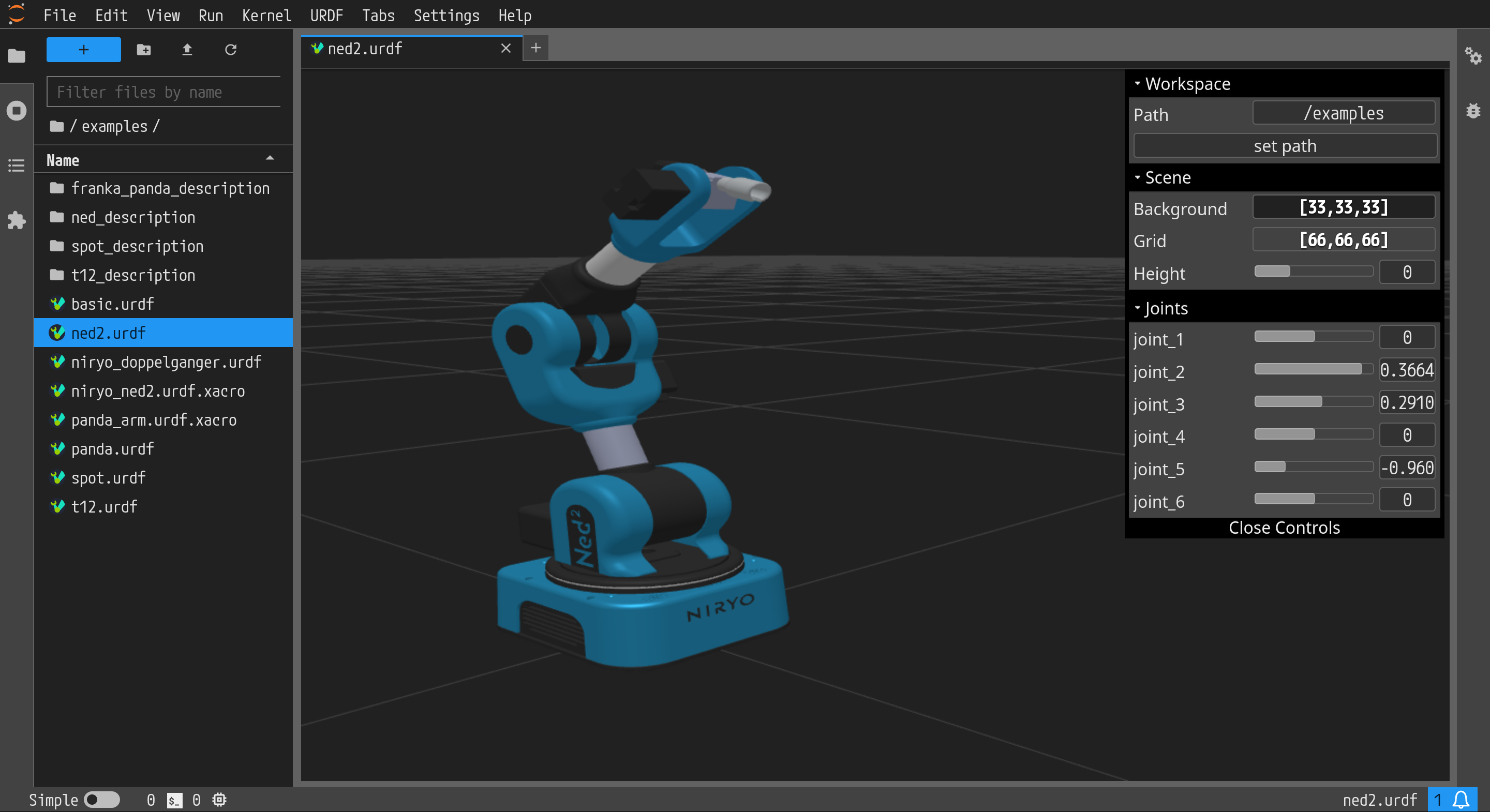
Niryo
The examples include a simplified version of Niryo which links a mesh file to create the gripping mechanism.
Note
The Path is relative to the directory where JupyterLab is launched from. When modifying, this path should point to the location of the robot description packages containing the mesh files. In this case, the path is by default set to /examples because this is the parent directory of the robot description packages.
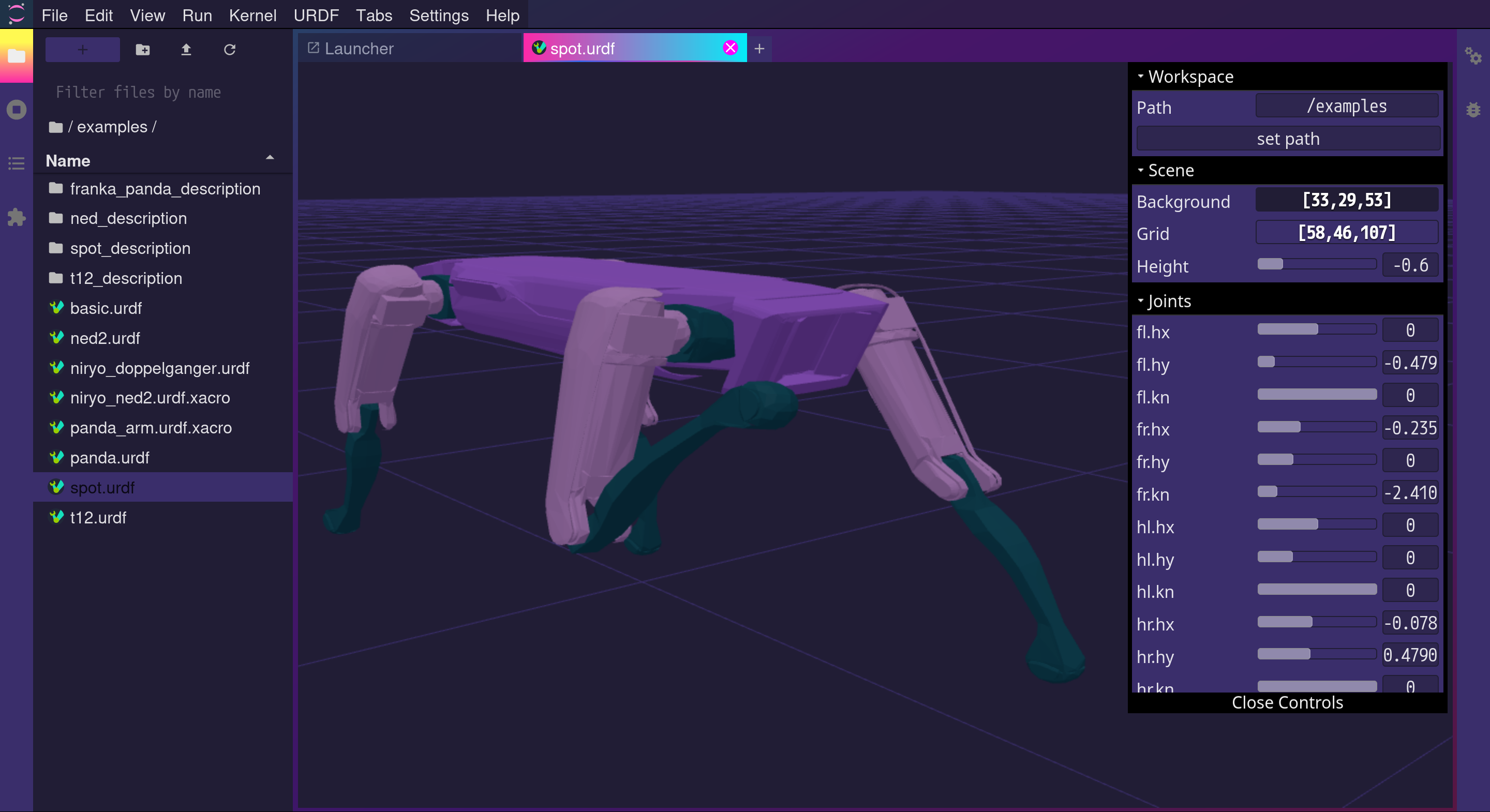
Spot
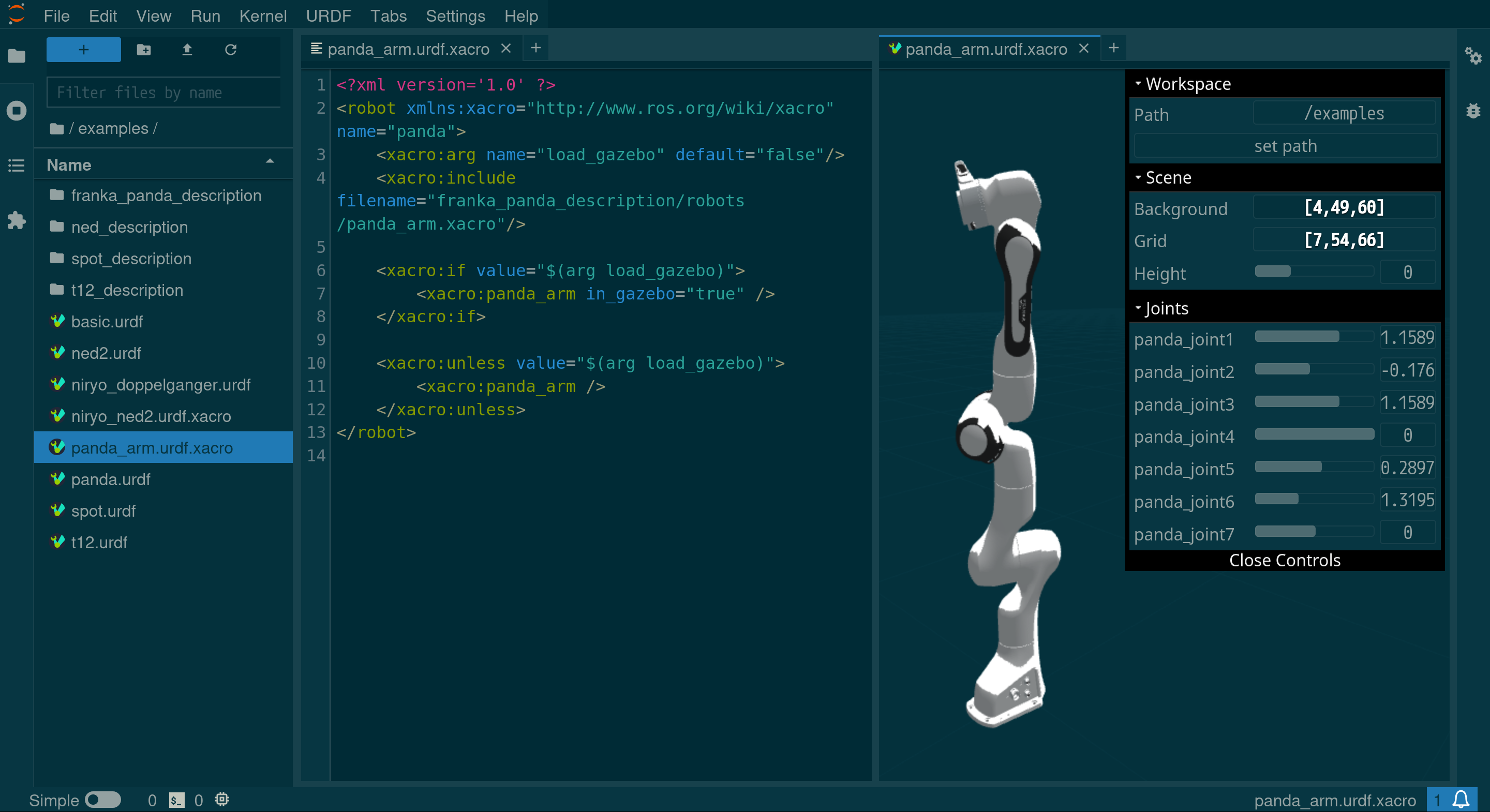
Panda
Xacro files are also supported. However, it is not (yet) possible to search for
packages with $(find robot_description).
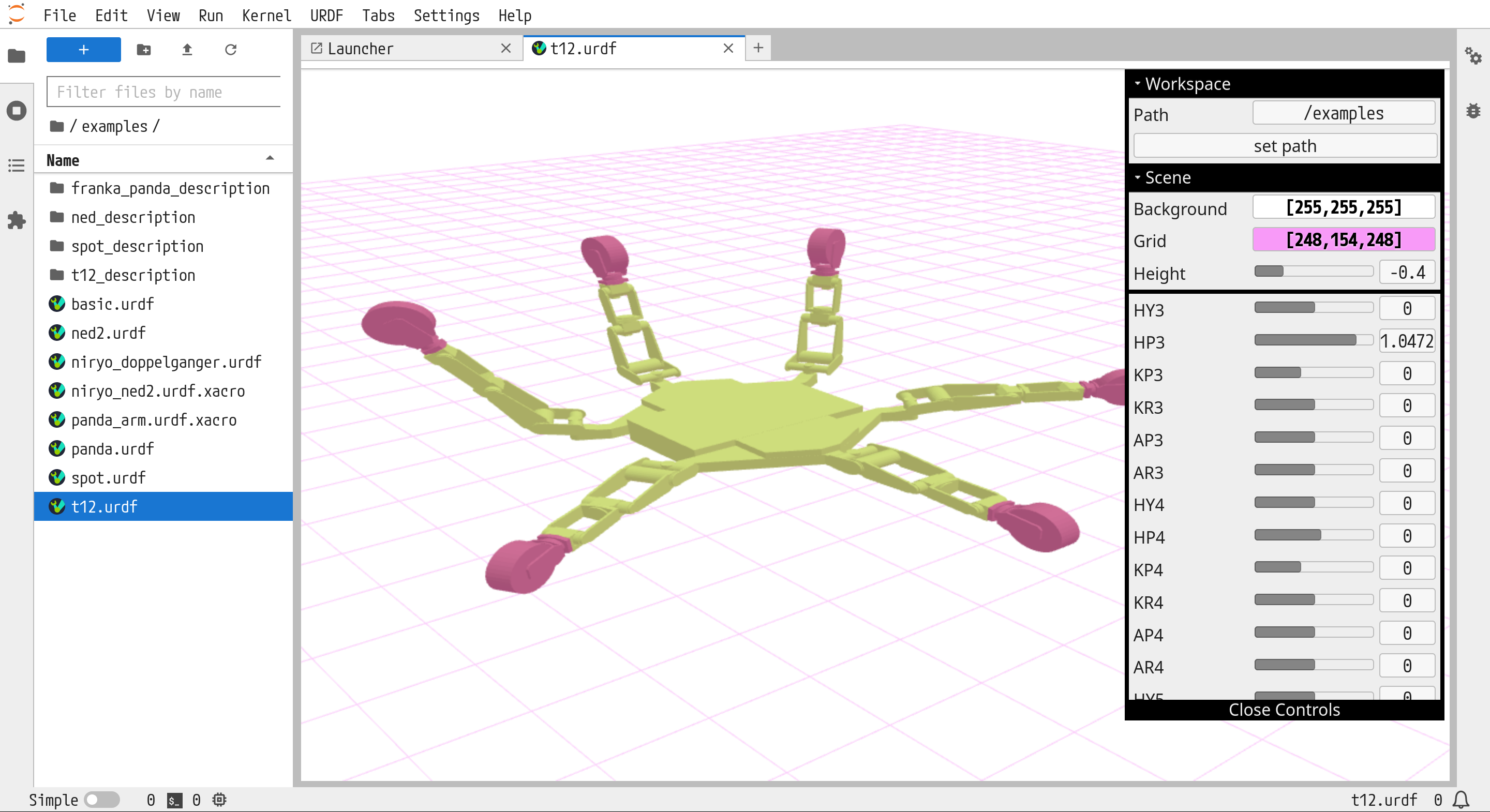
T12